+1.585.321.5800
Sensors Command Reference
As the GSG unit simulates a user’s movement along a given trajectory, it can also be configured to output sensor data generated by the user dynamics. The generated sensor output data is a result of the user exercising his six degrees of freedom:
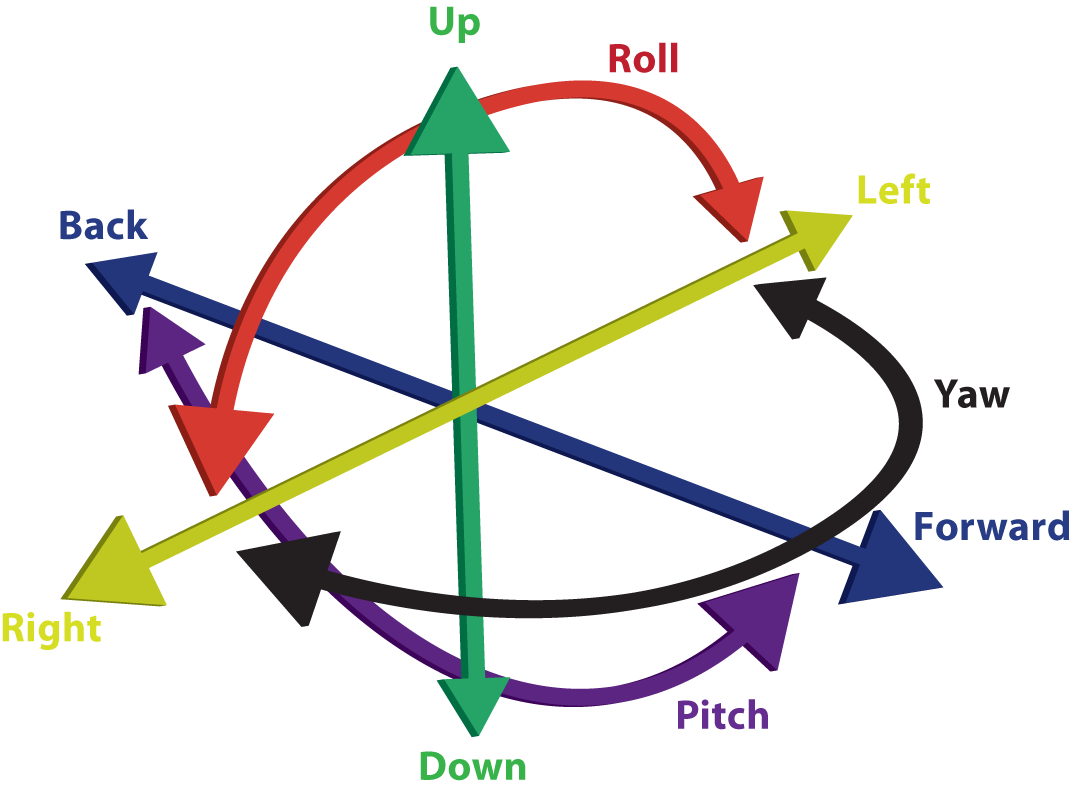
- forward/backward
- left/right
- up/down , as well as the rotations around the three perpendicular axes:
- pitch
- yaw
- roll.
All sensors are initially mounted so that at start of the simulation the sensor’s coordinate system XYZ is aligned with the user's ENU system (East, North, Up).
- The X axis has a positive direction towards the right side of the sensor.
- The Y axis has a positive direction towards the front of the sensor.
- The Z axis has a positive direction towards the top of the sensor.
At the start of a scenario, the X axis corresponds to the east/west axes of the ENU system while the front of the sensor—positive direction on the Y axis—is pointing to the north.